
I prudutti

palettizzatore automaticu di scatula di cartone
Descrizione breve:
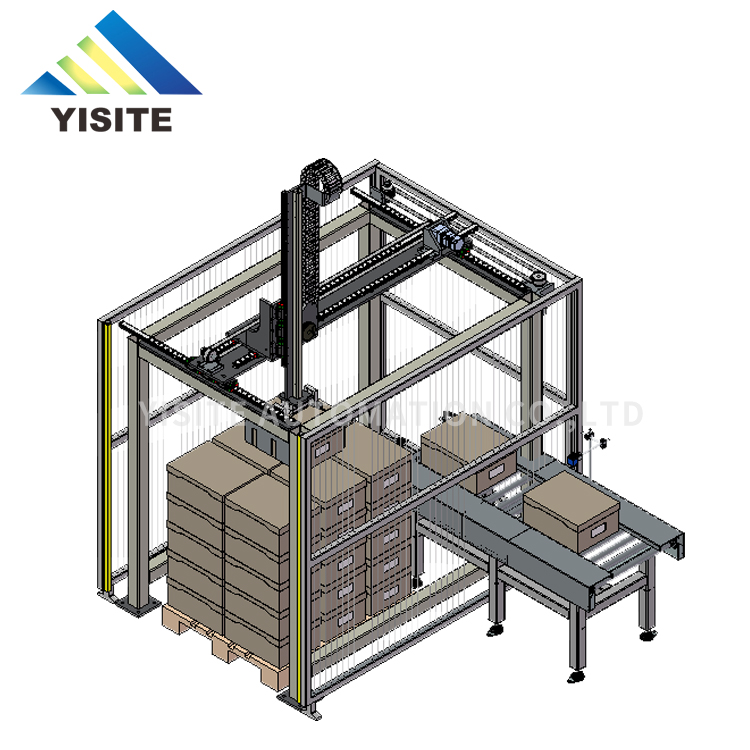
Introduzione di u produttu di palletizzatore automaticu di scatula di cartone: L'unità principale di u palletizzatore hè cumpostu di un trolley chì pò viaghjà avanti è retrocede, un quadru, è una piattaforma di trasportatore chì pò esse alzata è falata. A dimensione è l'attrezzatura ponu esse persunalizati.
scatula di cartone gantry paletizer autumàticu hè cun un disignu spiciali di grip pneumatici, pressure adjustable, dotatu di valvola buffer di pressione, cusì chì l 'azzioni gripp furnitu cù miccanisimu induzzioni, pò automaticamente percepisce l 'uggettu, è informà u centru di cuntrollu di l 'uggettu afferrari.

nantu à noi

Semu un fabricatore prufessiunale di l'automatizazione persunalizata. I nostri prudutti includenu depalletizer, pick and place machine à imballare, paletizer, applicazione di integrazione di robot, manipulatori di carica è scaricamentu, formatura di cartone, sigillatura di cartone, dispenser di pallet, imballatrice è altre soluzioni d'automatizazione per a linea di produzzione di imballaggio back-end.
A nostra zona di fabbrica hè di circa 3.500 metri quadrati. U squadra tecnicu core hà una media di 5-10 anni di sperienza in l'automatizazione meccanica, cumprese 2 ingegneri di designu meccanicu. 1 ingegnere di prugrammazione, 8 travagliadori di assemblea, 4 persone di debugging post-vendita, è altri 10 travagliadori
U nostru principiu hè "u cliente prima, a qualità prima, a reputazione prima", aiutemu sempre i nostri clienti "aumentà a capacità di produzzione, riduce i costi, è migliurà a qualità" ci sforzemu di diventà un fornitore di punta in l'industria di l'automatizazione di e macchine.
Truss XYZ manipulatore di stacking di cartone cumpletamente automaticu
1. Composizione di a macchina stacker
A palletizing machine hè cumpostu di quadru di stallazione, sistema di pusizzioni, sistema di servo drive, sistema di cuntrollu, sistema di cuntrollu è distribuzione elettricu, dispositivu di prutezzione di sicurità, etc., equipatu di sistema di posizionamentu automaticu di l'alimentazione.
2. Stacking machine rack muntatura
Perchè a vitezza di u muvimentu di u stacker hè assai veloce, u statu di partenza hà un grande impattu nantu à u quadru di installazione. U quadru di installazione deve esse assai bonu rigidu per assicurà u funziunamentu stabile di u stacking, cusì avemu designatu a struttura di cornice d'acciaio saldata cum'è u quadru di supportu.
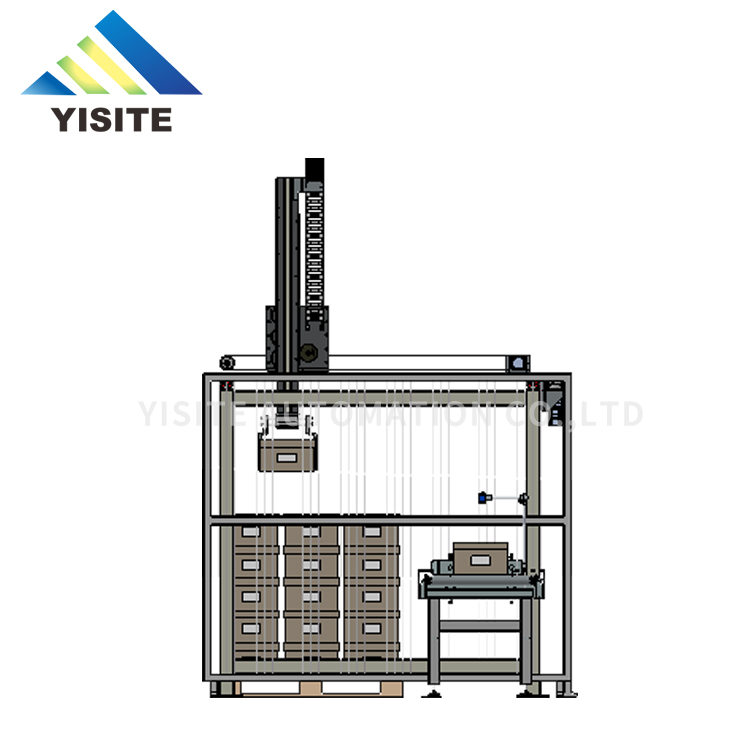
3. Stacker pallettizer machine pusizioni sistemu
U sistema di posizionamentu di stacker hè u core di tuttu l'equipaggiu, hè u pruduttu di a Cumpagnia Yaskawa (Giappone), a velocità di muvimentu veloce, è a precisione di ripetizione hè alta, X, Y, Z trè coordenate sò scelte per a trasmissione sincrona di cinturione di denti, coordenada unica. a precisione di posizionamentu ripetiri hè 0.1mm, vitezza di u muvimentu di linea veloce: 1000 mm / s.L'asse X hè un sistema di pusizioni unicu cù una sola lunghezza di 3000mm è un span di 1935mm. U trasmettitore sincronu assicura u muvimentu sincronu di i dui sistemi di pusizzioni è hè guidatu da un servomotore 1500W. Per accuncià u torque di guida è l'inerzia, ci hè un riduttore planetariu d'alta precisione.
L'assi Y utilizendu un sistema di pusizioni duale. U mutivu perchè l'unità di pusizzioni cù una sezione trasversale cusì grande hè principalmente perchè l'assi Y hè un supportu di doppia fine cù a struttura di sospensjoni media. Se a sezione trasversale selezziunata ùn hè micca abbastanza, a stabilità di u muvimentu di u robot ùn serà micca garantita, è u robot tremula quandu si move à alta velocità. a carica bè. Stu modu di stallazione hà una stabilità assai bona. I dui sistemi di pusizzioni sò guidati da un servomotore 1500W, equipatu di un riduttore planetariu d'alta precisione per currisponde à u torque è l'inerzia.
U sistema di pusizziunamentu di l'asse Z hè fermu è stabile. U pruduttu in generale hà u slider fissu è u muvimentu generale up and down. U servomotore hà bisognu di migliurà l'ughjettu rapidamente, chì deve superà a forza di gravità è accelerazione grande, è hà bisognu di più putenza. .In pràtica, avemu sceltu un servomotore 2000W, furnutu cù un riduttore planetariu d'alta precisione. L'assi A hè l'assi di rotazione.
4. Sistema di servo drive
A macchina manipulatrice di stacking usendu servomotore cù funzione digitale. Ogni arbre di u mutore hè dotatu di un servomotore è un riduttore, quattru servomotori è quattru riduttori, cumprese un mutore verticale cù un servomotore di serratura.
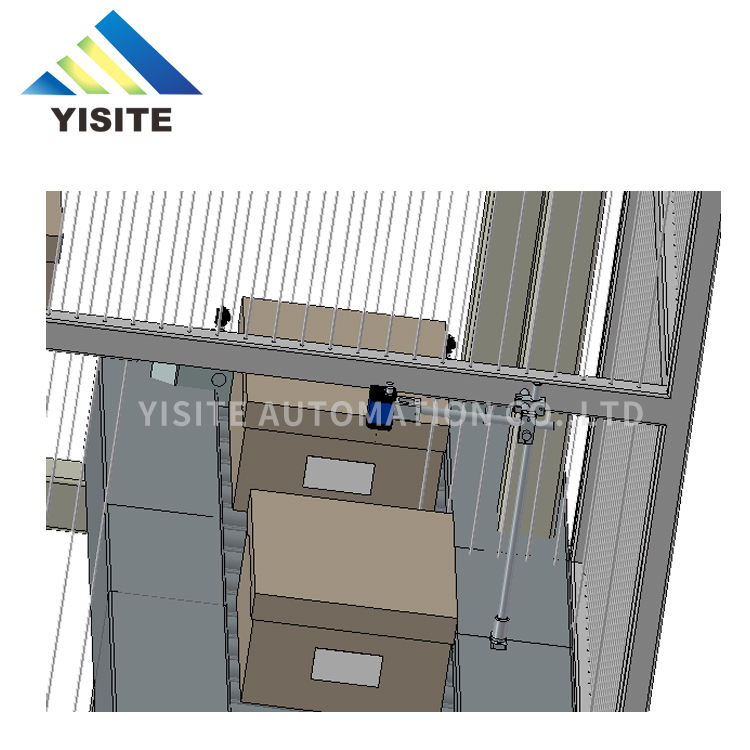
5. Stacker grip
L'impilamentu cù un disignu speciale di grip pneumaticu, pressione regulabile, equipatu di valvola di buffer di pressione, cusì chì l'azzione di presa dotata di mecanismu d'induzione pò automaticamente perceive l'ughjettu, è informà u centru di cuntrollu per a presa di l'ughjettu.
6, sistema di cuntrollu
U sistema di cuntrollu hè custituitu da un grande PLC è un touch screen.U sistema hà capacità di prugrammazione putenti. Cù diversi mudelli di palletizing, u sistema pò preset una varietà di prugrammi artefatti, è per rimpiazzà u prugramma currispundenti pò esse operatu nantu à u touch screen.
7, dispusitivu di sicurità
A macchina hà una funzione di sveglia è di sveglia, è ogni difettu pò riflette accuratamente u locu specificu, faciule è rapidamente per eliminà i difetti, cumpresi principalmente: funzione di prutezzione di collisione di robot; stallazione di u travagliu in u locu di rilevazione; prutezzione di sicurità di u screnu di luce.
Parametri tecnichi
1. Macchina mudellu: YST-MD1500
2. Capacità di stacking: 200-500 scatuli / H
3. Frame : SS41 (trattamentu plastica iniezione d'acciaio A3) fustu S45C bearing steel
4. Power: AC, 3 phase, 380V, 9KW 50HZ
5. Cunsumu d'aria: 500NL / MIN (usu di l'aria: 5-6kg / cm2)
6. Dimensioni di l'equipaggiu: (L) 3500mm (W) 2250mm (H) 2800mm (dipende da u disignu di u layout attuale)
7. Pesu di l'equipaggiu: 1 500 kg


Cunfigurazione di u vantaghju principali
1. Yaskawa marca servo motor
2. Taiwan riduttore di vitezza marca
3. Mitsubishi (Giappone) PLC
4. Contactor è switches deve esse usatu in Schneider
5. Sensor fotoelettricu Omron
6. Interfaccia cuntrollu azzione display è statu alarme è funzione alarme
7. Convertitore di freccia di marca Yaskawa
8. U quadru è i pannelli laterali sò fatti da l'azzaru di carbone
9. Elementi pneumatici di Taiwan AirTac
10. Italiana marca PIAB Sucker









