
I prudutti


Cullaburazione Robot Arm manipulator
Caratteristiche di a sospensjoni cantilever
1.Choose un bracciu di tippu di lega d'aluminiu o un cantilever d'acciaio;
assemblea 2.Modular, cantilever longu cantilever rimpiazzabile;
3.Rotary angle di 0-360 °;
installazione 4.Easy è viloci.


Vantaghji di a sospensjoni cantilever
1. cantilever hè una nova generazione di equipamentu di elevazione di luce per a produzzione muderna.Cù alta affidabilità di a catena di zucca elettrica di l'anellu hè soprattuttu adattatu per a corta distanza, l'usu frequente è l'operazione di elevazione intensiva, hà i vantaghji di alta efficienza, risparmiu d'energia, risparmiu di prublemi, spaziu chjuca, operazione faciule è mantenimentu.
2. U cantilever hè più flexible è l'adattabilità larga, è hè un equipamentu di elevazione d'urgenza separatu necessariu nantu à a linea di produzzione efficiente è automatica, chì pò assicurà u flussu lisu di a linea di produzzione.
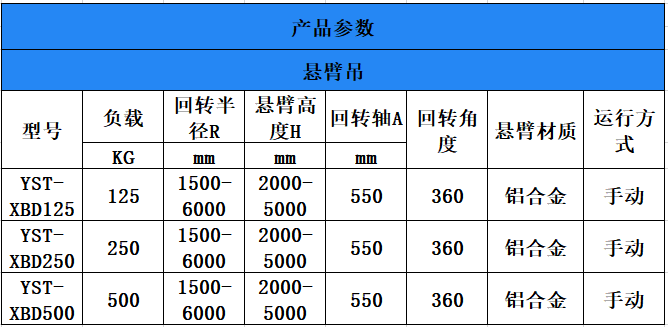
| Mudellu | Carica | R/mm | H/mm | A/mm | Rotazione | Materiale | U travagliu |
| YST-XBD125 | 125 | 1500-6000 | 2000-5000 | 550 | 360 | lega d'aluminiu | manu |
| YST-XBD250 | 250 | 1500-6000 | 2000-5000 | 550 | 360 | lega d'aluminiu | manu |
| YST-XBD500 | 500 | 1500-6000 | 2000-5000 | 550 | 360 | lega d'aluminiu | manu |
Descrizzione di u produttu
I robot di cullaburazione sò una forma d'automatizazione robotica custruita per travaglià in modu sicuru à fiancu à i travagliadori umani in un spaziu di travagliu cumunu è di cullaburazione.In a maiò parte di l'applicazioni, un robot di cullaburazione hè rispunsevuli di travaglii ripetitivi è minimi, mentre chì un travagliadore umanu compie travaglii più cumplessi è intensivi di pensamentu.L'accuratezza, l'uptime è a ripetibilità di i robot di cullaburazione sò pensati per cumplementari l'intelligenza è e cumpetenze di risoluzione di prublemi di un travagliadore umanu.
I disinni di robot cullaburatori sò assai diffirenti da i so omologhi di robot industriali.Dotati di bordi arrotondati, limitazioni di forza è pesi ligeri, i robot di cullaburazione sò prima di tuttu pensati per a sicurità.A maiò parte di i roboti di cullaburazione sò dotati di una serie di sensori per evità scontri cù i travagliadori umani, è ancu di protokolli di sicurezza per chjude se si verifica una forma di cuntattu imprevisu.
Funzioni di u produttu
1.Choose un bracciu di tippu di lega d'aluminiu o un cantilever d'acciaio;
assemblea 2.Modular, cantilever longu cantilever rimpiazzabile;
3.Rotary angle di 0-360 °;
installazione 4.Easy è viloci.
-

Paranco elettrico a fune metallica gru a sbalzo
-

Gru a cantilever a colonna
-

Manipulatore pneumaticu di gru di l'aria in foglia d'acciaio
-

Gru d'aspirazione pneumatica in lamiera d'acciaio di metallo m...
-

Gru di bracciu di robot di bilanciu di parancu elettricu
-

Gru di robot d'equilibriu di parancu pneumaticu d'aria









