
I prudutti

Manipulatore di aspirazione per manipolazione di vetru
Descrizione breve:
Stu manipulatore pneumaticu di manipolazione di vetru hè u nostru sviluppu principarmenti indipindenti di trasportà l'equipaggiu d'imballaggio di vetru di bracciu di putenza, l'operazione simplice di buttone pò realizà a manipulazione rapida di l'imballu di vetru, abbandunà parechje cundizioni di produzzione di elevazione artificiale, riduce i danni di vetru è macchie, etc., migliurà l'efficienza di a produzzione, risparmià u travagliu, funziunamentu simplice, sicuru è affidabile.


nantu à noi

Semu un fabricatore prufessiunale di l'automatizazione persunalizata. I nostri prudutti includenu depalletizer, pick and place machine à imballare, paletizer, applicazione di integrazione di robot, manipulatori di carica è scaricamentu, formatura di cartone, sigillatura di cartone, dispenser di pallet, imballatrice è altre soluzioni d'automatizazione per a linea di produzzione di imballaggio back-end.
A nostra zona di fabbrica hè di circa 3.500 metri quadrati. U squadra tecnicu core hà una media di 5-10 anni di sperienza in l'automatizazione meccanica, cumprese 2 ingegneri di designu meccanicu. 1 ingegnere di prugrammazione, 8 travagliadori di assemblea, 4 persone di debugging post-vendita, è altri 10 travagliadori
U nostru principiu hè "u cliente prima, a qualità prima, a reputazione prima", aiutemu sempre i nostri clienti "aumentà a capacità di produzzione, riduce i costi, è migliurà a qualità" ci sforzemu di diventà un fornitore di punta in l'industria di l'automatizazione di e macchine.
Caratteristiche di u produttu
1.Glass manipulatore di putenza manipulatore cù alta stabilità, simplice per uperà. Cù un cuntrollu pneumaticu cumpletu, u prucessu di manipolazione di pezzi pò esse cumpletu da u funziunamentu di l'interruttore di cuntrollu pneumaticu.
2.Pneumatic machini cù altu efficienza, cortu manipolazione cycle.After la manipulazione principia, l 'operatore pò cuntrullà u muvimentu artefact in u spaziu cù menu forza, è pò firmà à ogni pusizioni, è u prucessu di manipulazione hè facile, viloci è coherent.
3.High performance di sicurità, crià un dispusitivu di prutezzione di ruttura di gas.Quandu a prissioni surghjente di gas sparisci subitu subitu, l 'artefact ferma in a pusizioni uriginale senza falà subitu.
4.I cumpunenti principali di u manipulatore putenza sò tutti fatti di prudutti di marca famosu internaziunale, è a qualità hè garantita.
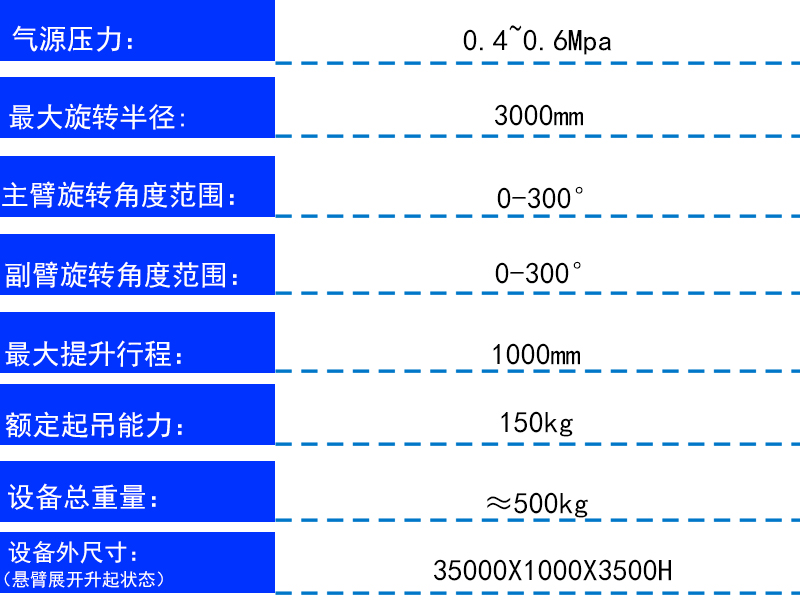
paràmetru di prestazione
1 、 Pressione di fonte d'aria: 0.4 ~ 0.6Mpa
2 、 raghju di rotazione: 2000 mm
3 、 Rotazione di u bracciu principale: 0-300 °
4 、 Rotazione di u bracciu ausiliariu: 0-300 °
5, corsa di elevazione: 600 mm
6, Gamma di elevazione: 700mm-1250mm
7、Pressione di travagliu: ≥0.5Mpa
8 、 Capacità di carica di elevazione: 70 kg
9、Pesu di a macchina: ≈400kg
10 、 Dimensione di a macchina: 32600x 1300x3200H
11 、 Dimensione di u pruduttu: L2200/1800xW1300/500xT10/5mm;
Cunfigurazione di a funzione di l'equipaggiu
1. A fonte principale di gasu di l'equipaggiu hè furnutu cù un cisterna di almacenamentu di gasu per prevene a rottura è a prutezzione brusca di u gasu.
2. L'armi di rotazione principali è ausiliarii di u manipulatore di putenza anu a funzione di frenu per impediscenu a rotazione accidintali è a scontru di l'armi ausiliari è l'attrezzi.
3. U cilindru di elevazione di a sospensjoni hà un mecanismu di limitu meccanicu per impedisce in modu efficace u bracciu meccanicu di sopra à a gamma di elevazione.
4. U flange fissu di u bracciu principale di u manipulatore assistitu di vetru hà un dispositivu limite di l'angolo di rotazione, è u bracciu rotativu pò esse formulatu secondu u situ attuale.
Girate u intervallu d'angolo.
5. A funzione di rotazione di u bracciu clamp hà un apparatu di limitu di l'angolo di rotazione per prevene i danni fora di l'angulu
Elementi di rotta aerea.
6. U dispusitivu di aspirazione di u pruduttu hà a funzione di regulazione di l'equilibriu per impedisce u parallelismu inconsistente di i punti di pickup è di liberazione.
7. L'attrezzatura di u manipulatore adopta l'aspirazione di aspirazione è hè cuntrullata da e regioni per facilità a rimuzione è a liberazione di i prudutti.
8. U bracciu di equilibriu hè cuntrullatu da u modu di cuntrollu di gasu pienu, chì hà e caratteristiche di alta sicurezza è efficienza di travagliu stabile.







