
I prudutti


YST-125 Manipulatore assistitu da u mutore
Descrizione breve:
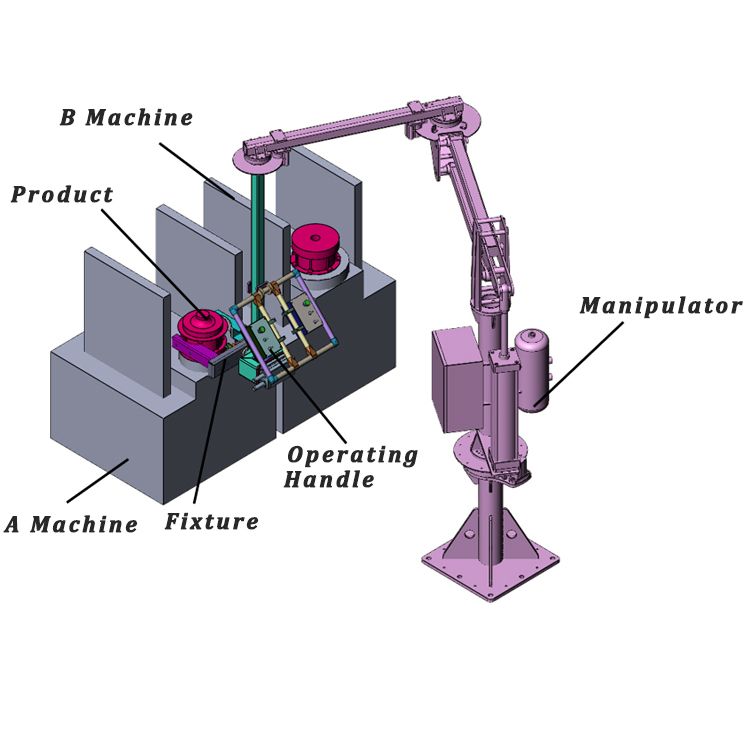
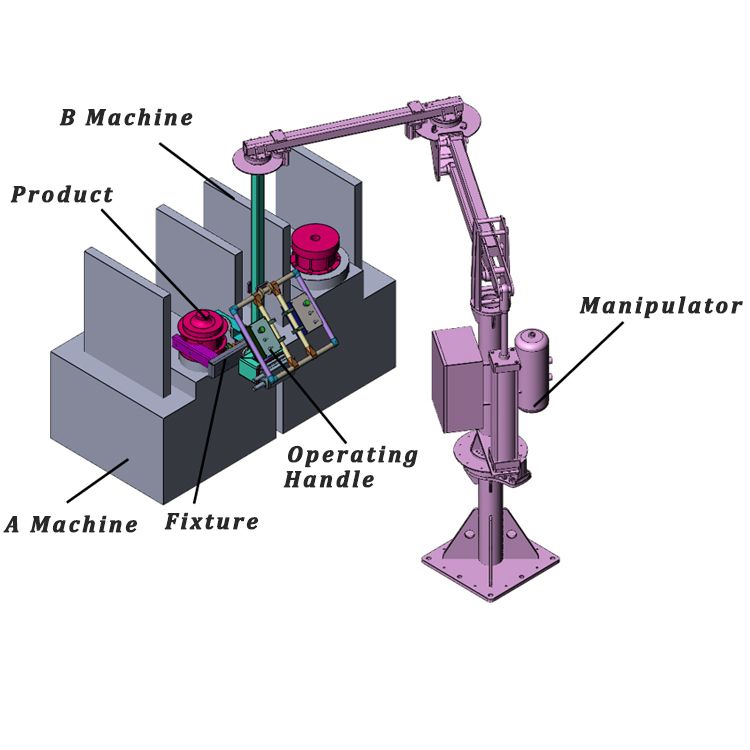
U manipulatore assistitu da a putenza, cunnisciutu ancu a gru di bilanciu, hè un novu dispositivu assistitu da u putere per a manipulazione di materiale è l'operazione di risparmiu di travagliu durante a stallazione.

Applicà ingeniosamente u principiu di equilibriu di forza, cusì chì l'operatore pò spinghja è tirà u pesu in cunseguenza, è poi pò spustà è pusizioni in u spaziu in equilibriu. Senza operazione di jogging qualificata, l'operatore pò spinghja è tirà l'ughjettu pisanti cù a manu, è l'ughjettu pesante pò esse piazzatu in ogni pusizioni in u spaziu currettamente.

Per a portabilità di u manipulatore assistitu, una suluzione simplice hè di muntà u postu in terra di u manipulatore assistitu à una grande piastra d'acciaio per agisce cum'è contrapesu à u manipulatore è a carica generale. Allora, bagnendu a forchetta nantu à a piastra d'acciaio, l'unità pò esse facilmente spustata in ogni locu cù un carrettu elevatore. Chjamemu un manipulatore mobile assistitu da u putere.
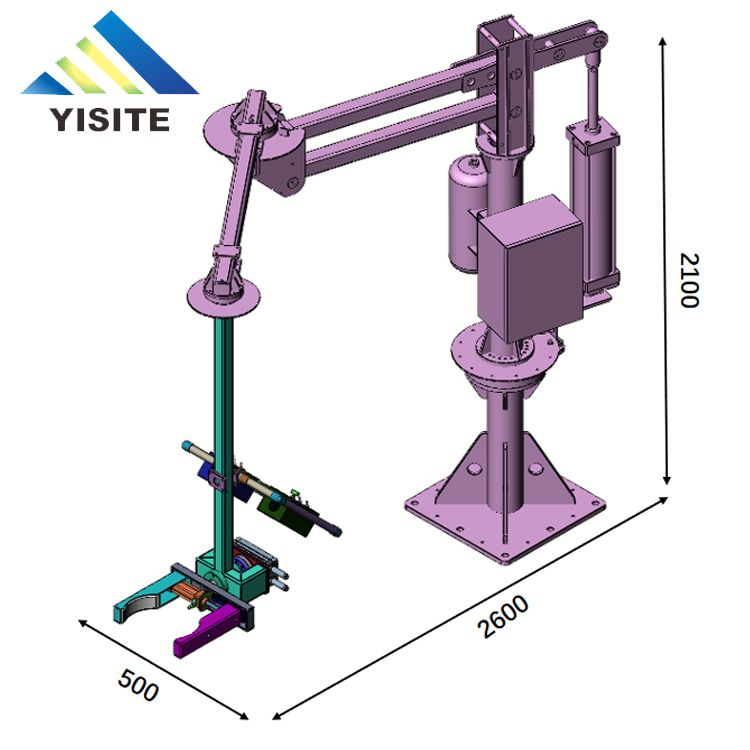
U manipulatore assistitu da u putere, l'attrezzu pò esse persunalizatu secondu i bisogni, è hè adattatu per a manipulazione è a carica è u scaricamentu di diversi pezzi di travagliu. U pesu di u produttu hè 50KG, u raghju di travagliu di u manipulatore hè di 2,5 metri, è l'altezza di elevazione hè di 1,3 metri.

nantu à noi

Semu un fabricatore prufessiunale di l'automatizazione persunalizata. I nostri prudutti includenu depalletizer, pick and place machine à imballare, paletizer, applicazione di integrazione di robot, manipulatori di carica è scaricamentu, formatura di cartone, sigillatura di cartone, dispenser di pallet, imballatrice è altre soluzioni d'automatizazione per a linea di produzzione di imballaggio back-end.
A nostra zona di fabbrica hè di circa 3.500 metri quadrati. U squadra tecnicu core hà una media di 5-10 anni di sperienza in l'automatizazione meccanica, cumprese 2 ingegneri di designu meccanicu. 1 ingegnere di prugrammazione, 8 travagliadori di assemblea, 4 persone di debugging post-vendita, è altri 10 travagliadori
U nostru principiu hè "u cliente prima, a qualità prima, a reputazione prima", aiutemu sempre i nostri clienti "aumentà a capacità di produzzione, riduce i costi, è migliurà a qualità" ci sforzemu di diventà un fornitore di punta in l'industria di l'automatizazione di e macchine.
Manipulatore di robot di putenza di cable
| Mudellu | YST-125 | |
| struttura meccanica | Manipulatore assistitu | |
| modu di esecutivu | Semi-automatizazione | |
| Pesu di palettizazione (senza attellu) | 20 kg | |
| Asse di muvimentu | 3 assi | |
| Gamma di attuazione | Asse Z (in alto in basso) | 1400 mm |
| assi 1 (Spin) | 0-300 ° | |
| assi 2 (Spin) | 0-300 ° | |
| assi 3 (Spin) | 0-300 ° | |
| Max raggiu di spin | 2000 mm | |
| U pesu di u corpu (senza attellu) | 200 kg | |
Dettagli di u produttu
1. U manipulatore mobile assistita da u putere hà una funzione di sospensjoni full-range, è l'operazione hè faciule è libera;
2. U manipulatore assistitu da u putere hè fabricatu secondu i principii di l'ergonomia, è l'operazione hè còmoda è còmuda;
3. U disignu di a struttura di u manipulatore mobile assistitu hè modulare, è u cuntrollu di u circuitu di l'aria hè integratu;
4. U manipulatore mobile power-assisted aiuta à riduce i costi di u travagliu da 50%, riduce l'intensità di u travagliu da 85%, è cresce l'efficienza di a produzzione da 50%;
5. U manipulatore mobile power-assisted hè persunalizatu secondu a carica di u produttu è u colpu di u funziunamentu, cù diverse forme per risponde à e diverse esigenze.









